![]()
Регулирование частоты вращения двигателей определяется в соответствии с требованиями
технологических процессов и тех производственных механизмов, в которых они используются.
Оно характеризуется следующими основными показателями.
Диапазон регулирования Д
(предел изменения частоты вращения).
Под этой величиной понимается отношение максимальной частоты вращения двигателя
к его минимальной частоте вращения.
Плавность регулирования
, которая характеризуется минимальным
скачком частоты вращения двигателя при переходе с одной механической характеристики
на другую.
Направление возможного изменения частоты вращения двигателя (зона
регулирования).
При номинальных условиях работы (напряжении и частоте питающей сети) двигатель
имеет естественную механическую характеристику. При регулировании частоты вращения
соответствующие им характеристики будут отличаться от естественной. Эти характеристики
носят название искусственных (регулировочных) характеристик. С помощью одних
методов регулирования удается получить искусственные характеристики, располагающиеся
только ниже естественной. Другие методы обеспечивают регулирование частоты вращения
выше и ниже естественной характеристики. Экономичность регулирования определяется
по дополнительным капитальным затратам, необходимым при создании регулировочных
устройств, а также по потерям электроэнергии при регулировании.
Наиболее распространенным и эффективным способом изменения скорости является изменение частоты с помощью инвертора в качестве источника питания. Этот метод стал популярным благодаря разработке и снижению стоимости силовой электроники. Способы, связанные с уменьшением напряжения на обмотках двигателя с резисторами, трансформаторами или обмотками электродвигателей, все еще используются и являются недорогими и предпочтительными методами для определенных четко определенных применений.
Выберите инвертор, который может подавать напряжение и ток двигателя, включая пусковой ток. Используйте диапазон изменения скорости, необходимый для выбора диапазона частоты, который должен быть установлен преобразователем. Контроллеры инвертора будут изменять частоту, подаваемую на двигатель, и скорость двигателя будет изменяться соответствующим образом.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Добавьте переменное сопротивление в цепь двигателя, чтобы уменьшить напряжение на главной обмотке, если инвертор слишком дорогостоящий и точное управление скоростью не требуется. «Скольжение» двигателя, обычно близкое к нулю, будет увеличиваться по мере того, как к двигателю подается пониженная мощность, а полюса двигателя не получают достаточной мощности для создания силы, необходимой для поддержания нормальной скорости. Двигатель должен быть сконструирован для высокая проскальзывание, а сопротивление и схема конструкции специфичны для конкретного применения.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Используйте переменный трансформатор напряжения, чтобы изменить напряжение, подаваемое на главную обмотку, если вы хотите повысить эффективность работы с пониженным напряжением, что более эффективно. Преобразователь переменного напряжения имеет низкие потери по сравнению с переменным резистором. В любом случае скорость двигателя изменяется с дискретными приращениями, а подробный дизайн снова специфичен для установки, где он используется. Такой двигатель имеет определенное количество отводов на его основной обмотке, что позволяет ему работать с разными напряжениями, приложенными к его магнитному полю.
Регулирование частоты вращения асинхронных двигателей может производиться способом воздействия на него со стороны статора или со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Регулирование частоты вращения изменением частоты питающей сети является наиболее экономичным способом регулирования и позволяет получить хорошие механические характеристики электропривода. При изменении частоты питающей сети обеспечивается изменение частоты вращения магнитного поля асинхронного двигателя. Источник питания двигателя должен осуществлять преобразование напряжения стандартной частоты сети 50 Гц в напряжение с требуемой частотой. Одновременно с изменением частоты должна регулироваться по определенному закону и величина подводимого к двигателю напряжения, чтобы обеспечить высокую жесткость механической характеристики и требуемую перегрузочную способность двигателя. При регулировании частоты вращения асинхронных двигателей изменением частоты питающей сети можно обеспечить различные режимы работы: с постоянным вращающим моментом; с постоянной мощностью на валу; с моментом, пропорциональным квадрату частоты.
Количество отводов и количество скоростей, доступных для конкретного двигателя, обычно не более четырех. Этот метод распространен в вентиляторах с низкой, средней и высокой скоростью с помощью переключателя переключателей. Точная скорость в этих устройствах не важна, а метод контроля скорости - это низкая стоимость.
Способы регулирования активной и реактивной мощности синхронной машины
А - это двигатель с постоянной скоростью, что означает, что для всего диапазона нагрузок изменение скорости двигателя довольно мало. могут быть очень легко изменены с хорошей эффективностью, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и плохим. Поскольку асинхронные двигатели широко используются, их регулирование скорости может потребоваться во многих приложениях. Ниже приводятся различные методы контроля скорости асинхронного двигателя.
Зависимости между регулируемыми напряжением и частотой с учетом влияния активного сопротивления статора, изменения жесткости механических характеристик, насыщения стали, ухудшения теплоотдачи на низких частотах вращения ротора двигателя имеют довольно сложный характер. В качестве источника питания могут применяться электромашинные вращающиеся преобразователи, использующие электрические машины, или статические преобразователи частоты на полупроводниковых приборах, которые серийно выпускает промышленность. Положительным свойством частотного регулирования является возможность плавного регулирования в широком диапазоне в обе стороны от естественной характеристики (в том числе возможно вращение двигателя с частотой, большей номинальной). При регулировании обеспечивается жесткость характеристик и высокая перегрузочная способность. Однако в ряде случаев в приводах металлообрабатывающих станков, электрошпинделей, мощных воздуходувок и других механизмов частотное регулирование является наиболее приемлемым.
Управление скоростью асинхронного двигателя со стороны статора
Изменяя приложенное напряжение
Следовательно, для обеспечения одинакового крутящего момента нагрузки скольжение увеличивается с уменьшением напряжения, и, следовательно, скорость уменьшается. Этот метод является самым простым и дешевым, который все еще используется редко, потому что. Для относительно небольшого изменения скорости требуется значительное изменение напряжения питания. большое изменение напряжения питания приведет к большому изменению плотности потока, следовательно, это нарушит магнитные условия двигателя.Изменяя приложенную частоту
Следовательно, синхронная скорость изменяется с изменением частоты подачи.Регулирование частоты вращения изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора. При неизменной частоте питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте питающей сети, равной 50 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Изменение количества полюсов статора
Однако этот метод широко не используется. Он может использоваться там, где асинхронный двигатель подается специальным генератором. Кроме того, при более низкой частоте ток двигателя может стать слишком высоким из-за уменьшения реактивности. И если частота увеличивается выше номинального значения, максимальный вращающий момент падает, а скорость возрастает.
Регулирование скорости со стороны ротора
Теперь вспомогательный двигатель В снабжен ротором, вызывающим ЭДС.Развитие с мощью комплексной механизированной технологии добычи угля и высокой производительностью и эффективностью шахтного строительства стало поворотным моментом для кузнечика, перевозимого двигателем. Электродвигателю с сопротивлением двигателя необходимо установить датчик положения на роторе, что может снизить надежность работы. Эффективность электромагнитной системы контроля скорости низкая, даже при низкой скорости. Это имеет большое значение для решения проблемы системы контроля скорости поперечной резки путем улучшения динамических характеристик асинхронной двигательной системы и использования метода векторного управления.
Кроме двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотка, а в четырехскоростных - две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин. Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин. К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность и относительно большой диапазон регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.
Конкретная формула преобразования выглядит следующим образом. Возьмем первый сектор в качестве примера для расчета времени синтетического опорного пространственного вектора напряжения и пространство вектор-функция синтеза. Симуляционный анализ системы управления. Разработка системного программного обеспечения. Программное обеспечение системы состоит из двух частей: одна - программа управления компьютером, другая - управляющая программа нижнего компьютера. Эффект главного компьютера заключается в настройке параметра двигателя, включая скорость вращения и передачу информации о скорости потока с нижнего компьютера.
Как отмечалось, в рамках единой общепромышленной серии асинхронных двигателей 4А выпускается модификация многоскоростных двигателей, предназначенных для работы на двух, трех или четырех скоростях. Регулирование частоты вращения изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании.
Показана основная программная блок-схема системы управления. Цифры представляют собой основную схему системы управления, трехфазную стационарную и вращающуюся двухфазную модель и модель пропорционального интегрального контроллера. Когда скорость вращения составляет 120 рад с -1 и внезапное увеличение нагрузки до 70 Нм -1 через 5 с, на дисплее показаны скорость, крутящий момент и ток.
Результаты показывают, что через 5 секунд при торможении двигателем. Можно сделать вывод, что из результатов моделирования система может получать хорошие динамические характеристики при запуске двигателя, регулировать скорость вращения и нагрузку и выключение. Система контроля скорости может хорошо отслеживать заданную скорость и проверять правильность и осуществимость конструкции.
Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку. При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется.
Кажется, что каждый в эти дни хочет изменить скорость своего двигателя. Независимо от того, хотят ли они больше воздуха от своего вентилятора в жаркий день или они хотят снизить стоимость эксплуатации двигателя, стало практически обычной практикой менять или изменять скорость электродвигателей.
С момента создания трехфазного асинхронного двигателя было предрешено, что он будет работать со скоростью, определяемой частотой источника питания. Если требуется другая скорость, устройство должно быть подключено к выходному валу двигателя для выполнения задачи. Шкивы, шестерни, редукторы - все они использовались для получения желаемой скорости на ведомом валу. Некоторые из нас, старые таймеры, помнят устройства, такие как вариаторы и вихревые токовые муфты, которые позволят скорости варьироваться в зависимости от требований приложения.
Для регулирования частоты вращения уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя, в результате чего изменяются и значения рабочих скольжений. При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента. Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Ранние подразделения были очень грубыми по сегодняшним меркам, но они выполнили свою работу. Тогда было возможно управлять двигателем практически на любой скорости от 0 до номинальной частоты вращения с поворотом циферблата. Затем векторные приводы, степперы и сервоприводы. Изменения скорости сегодня могут быть такими же простыми, как добавление электронного привода или как инвазивное, как перемотка двигателя на другую скорость. Как и все остальное, каждый метод имеет боковую и нижнюю стороны.
Некоторые небольшие однофазные двигатели могут работать на разных скоростях благодаря добавлению резистора. Следует отметить, что результирующая скорость зависит от нагрузки, установленной на двигатель. Фактически выполняется ослабление двигателя за счет уменьшения напряжения на обмотке. «Потерянное» напряжение преобразуется в тепло, которое в любых практических целях направляется в атмосферу.
Регулируют изменением: частоты тока питающей сети; числа пар полюсов обмотки статора; параметров цепи статора или ротора. Для асинхронных электродвигателей применяются все три способа регулирования, для синхронных — только первый.
У коллекторных электродвигателей переменного тока частоту вращения регулируют способом, указанным для электродвигателя постоянного тока с последовательным возбуждением.
Большинство крупных однофазных двигателей не могут работать на пониженных скоростях. Эти двигатели часто используют центробежный механизм для отключения пусковой обмотки. Если скорость двигателя слишком сильно снижается, центробежный выключатель снова закрывается, позволяя высокому пусковому току течь в малой стартовой обмотке. Конечным результатом является отказ обмотки двигателя.
Однако необходимо определить ряд факторов, чтобы определить конкретную пригодность двигателя, поэтому позвоните нам, чтобы обсудить ваши особенности. Как указано выше, в течение десятилетий трехфазный двигатель был рассчитан на удельные обороты в минуту на основе частоты входящей линии. Реже были устройства, используемые для изменения частоты входящей мощности; однако многие из этих частотных преобразователей все еще используются.
Регулирование частоты вращения изменением частоты тока является наиболее экономичным, но для питания электродвигателя требуется отдельный генератор или преобразователь с регулируемыми частотой и напряжением. При этом способе необходимо стремиться, чтобы характеристики асинхронного электродвигателя обладали достаточной жесткостью, которую обеспечивают совместным регулированием частоты тока и напряжения.
Компании теперь продают устройства как отличный способ сэкономить энергию, особенно в приложениях с переменным крутящим моментом, таких как насосы и вентиляторы. Используя 60 Гц. вход для создания легко изменяемого частотного выхода, скорость вращения двигателя теперь регулируется. Изменяя напряжение и частоту с постоянным отношением, выходной крутящий момент согласуется от почти нуля до полного линейного напряжения.
В настоящее время доступны различные типы электронных приводов, использующие головокружительный ассортимент колоколов и свистов. Ваш мотор может делать то, что его предки могли только мечтать! Другим способом изменения скорости двигателя является перепроектирование обмотки во время обмотки. Однако выбор скорости намного более ограничен.
При пропорциональном понижении частоты тока и напряжения жесткость механической характеристики 1 (рис. 1) и максимальный момент Мmах уменьшаются незначительно по сравнению с естественной характеристикой 0. К преимуществам частотного регулирования следует отнести широкий диапазон (до 12:1) и плавность.
Регулирование частоты вращения изменением числа пар полюсов применяют только для асинхронных электродвигателей с короткозамкнутым ротором, так как у двигателей с фазным ротором потребовалось бы одновременное переключение обмотки ротора, усложняющее его схему и конструкцию.
Число пар полюсов можно изменить переключением числа секций одной обмотки или переключением двух независимых обмоток. В первом случае обмотка статора состоит из двух равных частей, включаемых последовательно или параллельно. Такое переключение позволяет изменить число пар полюсов в 2 раза и, следовательно, менять частоту вращения электродвигателя в отношении 2:1. Применение двух обмоток с различным числом пар полюсов позволяет менять частоту вращения в различных соотношениях, например, 1:3; 2:3 и т.д.
При этом есть некоторые практические ограничения, не в последнюю очередь диаметр диаметра ротора. Центробежные силы на роторе резко возрастают по мере увеличения оборотов. Если более крупный ротор теперь вращается в два раза по сравнению с об / мин из-за редизайна намотки, ротор внезапно должен обрабатывать в 4 раза больше, чем центробежная сила, с которой он был создан.
Привод способен выводить частоты до 300 Гц. Его двигатель не пропустил 120 Гц, прежде чем ротор буквально взорвался! Как и многие другие вещи, только потому, что вы можете изменить скорость обмотки, это не значит, что вы должны это делать. Если у вас нет доступа к трехфазной мощности, но вам нужно изменить скорость вашего двигателя, вы все еще в игре. Недавно клиент пришел к нам с вызовом. Он нуждался в большем количестве воды для орошения своего поля, но утилита обеспечивала бы только однофазную мощность, которая должна была быть доведена до его метра.
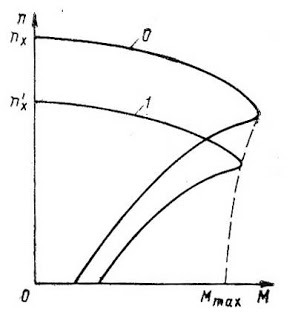
Рис. 1. Механические характеристики асинхронного электродвигателя при различной частоте тока
Двигатели, способные работать при двух различных числах пар полюсов, называют двухскоростными. Их конструируют для работы с постоянным моментом или постоянной мощностью.
Кроме двухскоростных двигателей, применяют трех- и четырехскоростные. Промышленность выпускает двухскоростные двигатели с одной обмоткой в статоре, трех- и четырехскоростные — с двумя обмотками, которые в свою очередь могут переключаться в отношении 2:1. Этот способ регулирования экономичен (двигатели имеют достаточно жесткие характеристики), но требует сложного переключающего устройства; кроме того, у двигателей с двумя обмотками резко снижается использование активной меди, так как при работе одной из обмоток вторая выключена. Однако благодаря своим преимуществам двигатели с переключением числа пар полюсов широко применяются в судовых электроприводах, не требующих плавного регулирования частоты вращения (шпилей, брашпилей и др.).
Регулирование изменением параметров цепей электродвигателя распространено у двигателей с фазным ротором. При введении в цепь ротора активного сопротивления частота вращения двигателя уменьшается при том же значении вращающего момента (). Этот способ неэкономичен, требует дорогого и громоздкого реостата, причем уменьшение частоты вращения составляет 10—20 %, поэтому в судовых условиях он применяется сравнительно редко и в основном на короткие промежутки времени.
Пуск синхронных двигателей. Различают прямой пуск и пуск с ограничением пускового тока.
Прямой пуск прост, но при включении возникают большие пусковые токи, достигающие значений I п = (4-7) I ном.
При питании электродвигателя от электростанции ограниченной мощности пусковые токи могут вызвать недопустимые кратковременные снижения напряжения, нарушающие работу включенных приемников электрической энергии. Поэтому прямой пуск применяется в том случае, если мощность электродвигателя во много раз меньше мощности электростанции, от которой он питается.
При мощности электродвигателя соизмеримой с мощностью электростанции применяют различные способы пуска с ограничением пускового тока: переключением обмотки статора двигателя со ; при помощи ; включением резисторов в цепь статора; включением реакторов в цепь статора; включением резисторов в цепь ротора (для двигателей с фазным ротором).
При пуске переключением обмоток статора со «звезды» на «треугольник» сначала замыкается выключатель Q1, при этом обмотки статора двигателя оказываются включенными «звездой» (рис. 2, а). После разгона двигателя выключатель Q1 размыкается, а выключатель Q2 замыкается, и обмотки включаются на «треугольник». При этом способе пусковой ток уменьшается в 3 раза.
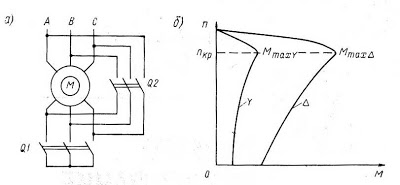
Рис. 2. Пуск двигателя переключением со «звезды» на «треугольник»
Преимуществом способа является его простота, недостатком — уменьшение пускового момента также в 3 раза (рис. 2, б). Уменьшение момента объясняется тем, что при соединении обмоток «звездой» напряжение на них в √3 раза меньше, чем при соединении «треугольником», а как видно из формулы (), момент зависит от напряжения во, второй степени. В некоторых случаях пусковой момент при соединении обмоток «звездой» оказывается недостаточным, тогда применение способа становится невозможным.
Преимуществом пуска двигателя с помощью автотрансформатора по сравнению с предыдущим способом является возможность установить любое первоначальное напряжение (рис. 3, а) и затем плавно увеличивать его. Недостатком этого способа являются высокая стоимость, большие масса и габаритные размеры пускового автотрансформатора. Характеристики приведены на рис. 3, б.
Включение на время пуска в цепь статора резисторов (рис. 4,а) или реакторов приводит к большим активным потерям в случае резисторов и уменьшению коэффициента мощности в случае реакторов, однако вследствие простоты этих способов они находят достаточно широкое применение. Как видно из формул () и (), включение элементов в цепь статора увеличивает критическую частоту вращения М mах1 и уменьшает момент M mах (характеристика 1, рис. 4, б).
Пуск двигателей с фазным ротором осуществляется с помощью пусковых реостатов, включенных в цепь ротора (рис. 5, а).
Пусковой реостат состоит из трех-четырех секций резисторов на каждую фазу. По мере разгона двигателя секции реостата поочередно закорачивают. Сопротивления пускового реостата рассчитывают графоаналитическим методом с использованием пусковой диаграммы. В начале пуска в цепь ротора включают реостат с полным сопротивлением, при котором пусковой момент должен быть М п = (0,7 - 0,8)Мmах.
Механические характеристики асинхронного двигателя на рабочем участке от М = 0 до М = 0,8 М mах можно приближенно считать прямолинейными, тогда на пусковой диаграмме (рис. 5, б) искусственная характеристика, соответствующая началу пуска, будет иметь вид прямой 4, проходящей через точки n х и г.
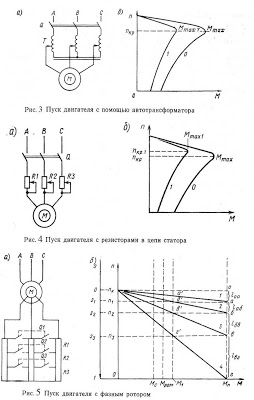
Рис. 3-5. Пуск двигателя с помощью автотрансформатора (3). Пуск двигателя с резисторами в цепи статора (4). Пуск двигателя с фазным ротором (5)
Под действием вращающего момента двигатель начнет вращаться с увеличивающейся частотой вращения, а вращающий момент, как видно из характеристики, будет уменьшаться. Этот процесс будет продолжаться до тех пор, пока вращающий момент не станет равным моменту сопротивления М с, причем частота вращения будет меньше номинальной, соответствующей естественной характеристике.
Для увеличения частоты вращения необходимо выключить секцию пускового реостата R3 (см. рис. 5), замкнув выключатель Q3. Обычно это делают в точке г" (см. рис. 5, б) при вращающем моменте двигателя M 1 = (1,1-1,2) M ном. Оставшееся сопротивление пускового реостата должно быть таким, чтобы момент двигателя на искусственной характеристике 3 не превышал значения пускового момента M п, т.е. характеристика 3 должна пройти через точку "в" (считается, что за время замыкания выключателя Q3 частота вращения двигателя n 3 не изменяется). Аналогично замыкают выключатели Q2 и Q1, двигатель переходит на работу в соответствии с характеристиками 2 и 1, пока не будет полностью шунтирован реостат.
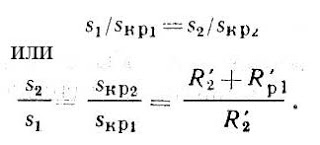
Если для естественной характеристики 1
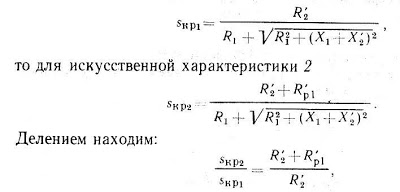
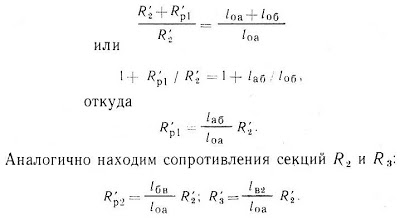
Т. е. отношение критических скольжений для искусственной характеристики 2 и естественной характеристики 1 равно отношению приведенного активного сопротивления фазы ротора, включая сопротивление секции пускового реостата, к приведенному активному сопротивлению ротора.
Видно, что при любых одинаковых моментах для естественной и искусственной характеристик имеет место условие s/s кp = const, следовательно, для характеристик 1 и 2 при моменте М = М п справедливо равенство
На пусковой диаграмме (см. рис. 5) скольжению s 1 соответствует отрезок "оа", а скольжению s 2 — отрезок "об". Обозначим длину первого отрезка l оа, второго l оа + l об, тогда:
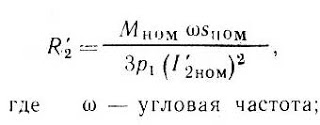
Активное сопротивление обмотки ротора двигателя определяется по каталогу. Если в каталоге данные о сопротивлении отсутствуют, его можно вычислить по формуле:
Электрическое торможение. Способы электрического торможения двигателей переменного тока аналогичны .
Режим торможения с отдачей энергии в сеть наступает при частоте вращения ротора, превышающей частоту вращения магнитного поля. Такой режим возможен при разгоне двигателя под действием падающего груза или при переключении много-скоростного электродвигателя на меньшую скорость.
При разгоне двигателя под действием падающего груза по естественной характеристике 0 (рис. 6) частота вращения увеличивается и при М = 0 достигает частоты вращения магнитного поля n х. При дальнейшем разгоне двигателя частота вращения становится больше n х, больше напряжения сети и машина работает в режиме генератора, отдавая в сеть активную энергию. Этому режиму соответствует участок характеристики в квадранте II.
Динамическое торможение асинхронного двигателя производится отключением обмотки статора от трехфазной питающей сети и включением ее на питание от источника постоянного тока (рис. 7), при этом в двигателе вместо вращающегося магнитного поля возникает неподвижное (n х = 0). В результате взаимодействия вращающегося ротора с неподвижным магнитным полем возникает тормозной момент (см. рис. 6, характеристика 1). Тормозной момент можно регулировать изменением напряжения постоянного тока или изменением сопротивления резистора R (см. рис. 7).
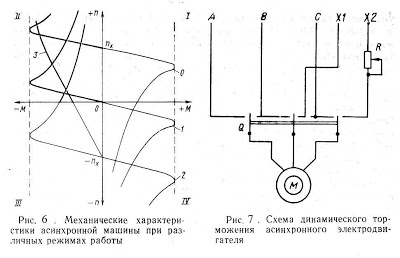
Рис. 6-7. Механические характеристики асинхронной машины при различных режимах работы (6). Схема динамического торможения асинхронного электродвигателя (7)
Для двигателей с фазным ротором, кроме того, регулирование тормозного момента возможно изменением сопротивления резисторов, включенных в цепь ротора.
Торможение противовключением может быть получено при реверсировании двигателя на ходу путем переключения двух фаз обмотки статора, при этом магнитное поле начинает вращаться в обратную сторону и тормозит двигатель. На рис. 6 этому режиму соответствует участок характеристики 2, находящийся в квадранте II. Когда частота вращения двигателя уменьшится до нуля, его необходимо отключить, в противном случае он начнет вращаться в обратную сторону (участок характеристики 2 в квадранте III).
Сравнение способов торможения
Сравнивая различные способы торможения двигателей переменного тока, можно сделать вывод, что наиболее экономичным является торможение с отдачей энергии в сеть , но при нем нельзя затормозить двигатель до частоты вращения меньшей, чем частота вращения магнитного поля.
Динамическое торможение позволяет тормозить электродвигатель до частоты вращения, близкой к нулю, но требует дополнительного источника постоянного тока.
Торможение противовключением наименее эффективно , так как при больших тормозных токах тормозной момент на валу двигателя с короткозамкнутым ротором незначителен.
Поэтому данный способ торможения применяется только для двигателей с фазным ротором, у которых за счет введения в цепь ротора резисторов с большим сопротивлением можно увеличить тормозной момент при одновременном уменьшении тока (см. рис. 6, характеристика 3).
контакты и мы моментально примем все действия для удаления Вашего материала.
⇓ОБСУДИТЬ СТАТЬЮ⇓
 Как сделать молочный коктейль блендером, миксером в домашних условиях?
Как сделать молочный коктейль блендером, миксером в домашних условиях? К чему снятся груши. К чему снится груша
К чему снятся груши. К чему снится груша Аяты из корана читать на русском языке
Аяты из корана читать на русском языке